Single Leg Hopping Robot
During my first semester at MIT, I took 2.74 Bio-Inspired Robotics taught by Sangbae Kim and Biomimetics Lab. I was excited about the project at the very beginning of the semester, Sangbae told us that the project is going to be in the general form of revealing a certain fact in animals with the methods in robotics. My friend and I have been thinking of interesting topics to work on and landed on this topic that we are the most curious about:
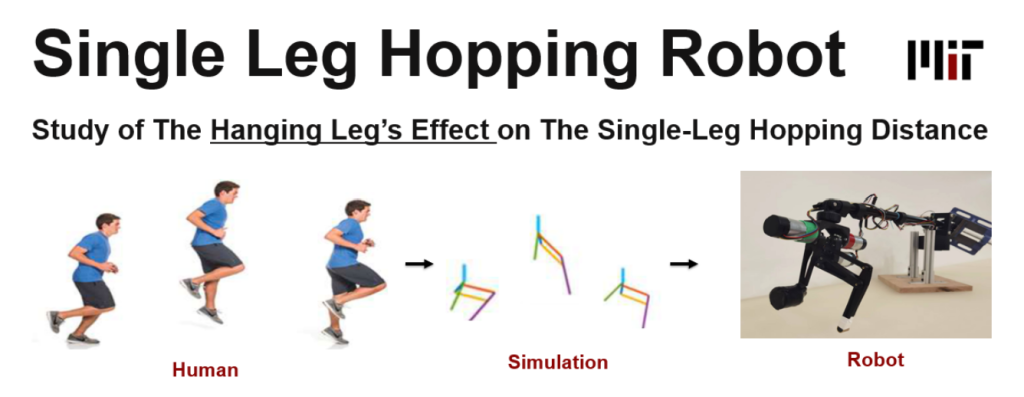
The hanging leg’s effect on single leg hopping’s distance: How to make the farthest jump?
When human hops on a single leg, the other leg(the hanging leg) usually swings, intentionally or subconsciously. It is quite a surprise to know other people hopping “habit”. Some would swing the hanging leg in the same direction as their motion. However, there are other people who would kick the hanging leg back while hopping, as if they are kicking the air behind them for a kickoff. We were intrigued, so we decided to look more into this effect with the opportunity of this project. We hope the effect can have some reference to humanoid robot hopping, once one of their legs is damaged.
My friend Zhenyang Chen, who I teamed up with in this class, made a very detailed post that covered most of this project, go check it out!
My experience in this class was fantastic, definitely one of the best classes I’ve taken. I especially enjoyed how the lecture is structured: Lectures in the first-half semester are mainly on the fundamentals of robotics. In the second half, lectures are more like talks on a specific topic, or an introduction to a field. Sangbae was an interesting lecturer, always combining the lecture with his own experience in an interesting way. One time he talked about how much working out means to staying healthy, especially core strength. He is why I started intensively working out(this and that I have more free time as a senior student now >:D)
My team was amazing and easy to work with. I stayed up the night before the presentation, doing some final tests on the robot. We didn’t get our final result(both simulation and on real robots) until 4:00 am in the morning, at the cost of breaking multiple cheap DC motors and a lot of coffee. But we made it happen, almost magically. We had a smooth presentation, good feedback from the audience, and a good laugh when Zhenyang showed some of the simulation failures gifs.
We had lunch afterward, sangbae was such a nice person to talk to. He shared with us his opinions on some fields of robotics, and his experience trying pig’s large intestine(a very famous food in my hometown) for the first time. We cracked some good laughs.
My experience in this class was fantastic, definitely one of the best classes I’ve taken. I especially enjoyed how the lecture is structured: Lectures in the first-half semester are mainly on the fundamentals of robotics. In the second half, lectures are more like talks on a specific topic, or an introduction to a field. Sangbae was an interesting lecturer, always combining the lecture with his own experience in an interesting way. One time he talked about how much working out means to staying healthy, especially core strength. He is why I started intensively working out(this and that I have more free time as a senior student now >:D)
My team was amazing and easy to work with. I stayed up the night before the presentation, doing some final tests on the robot. We didn’t get our final result(both simulation and on real robots) until 4:00 am in the morning, at the cost of breaking multiple cheap DC motors and a lot of coffee. But we made it happen, almost magically. We had a smooth presentation, good feedback from the audience, and a good laugh when Zhenyang showed some of the simulation failures gifs.
We had lunch afterward, sangbae was such a nice person to talk to. He shared with us his opinions on some fields of robotics, and his experience trying pig’s large intestine(a very famous food in my hometown) for the first time. We cracked some good laughs.